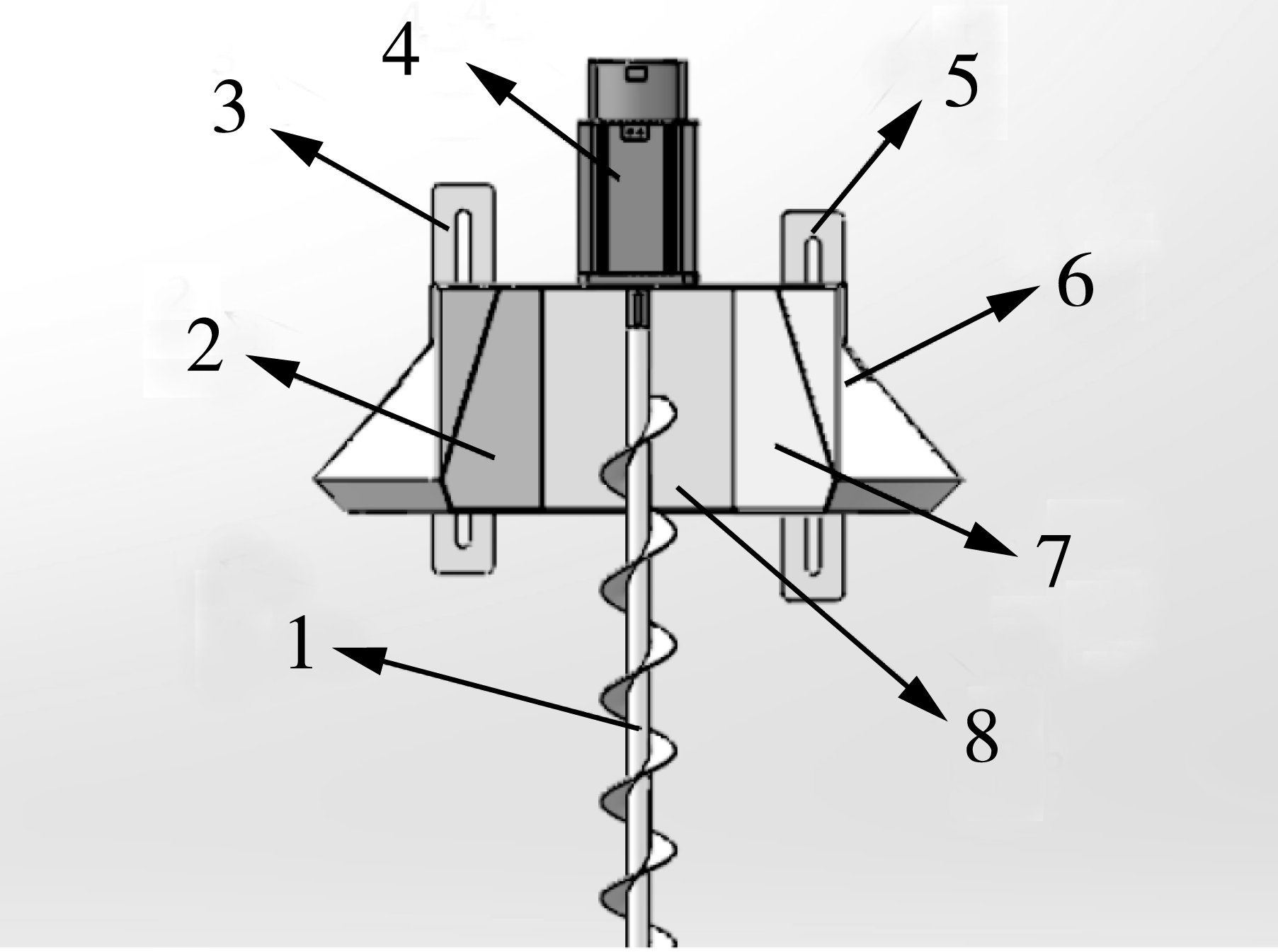
1螺旋输送器;2左侧壁;3左制动板;4驱动电机;5右制动板;6支撑体;7右侧壁;8前壁
图1 翻粮机三维模型
靳航嘉,李永祥,王明旭
(河南工业大学,河南 郑州 450009)
摘 要:通过对翻粮机工作原理、结构和物料运动以及力学和数学分析,建立翻粮机的关键参数计算数学模型,给出翻粮机在稻谷、小麦、玉米等不同粮食物料状况和不同产量下的最佳转速、螺距、螺旋升角和行进速度的关系及对应数值表,对翻粮机设计具有一定参考和实用价值。
关键词:翻粮机;最佳转速;行走速度
目前,我国在农业生产上的投入逐年加大,大力发展了农业机械,使得大量的收获机械在农村得到普遍应用,但机械收获谷物的水分和杂质含量大大超出了国家粮食收购储藏的标准。同时大部分地区没有足够的粮食晾晒场地,加之大量青壮年劳力进城务工,使新收湿粮陷入即无劳力又无场地晾晒的局面[1]。偏高水分粮食进入粮仓后,如果通风不畅或者存在温差,在换季时极易在粮堆表面形成结露层,粮食结露后形成结顶现象,造成通风不透,影响通风降温散湿的效果。粮食水分升高会引起微生物大量繁殖,同时伴随着粮食发热等现象的出现,若不及时处理,粮食就会霉变甚至丧失使用价值。为减小储粮损失,粮库通常需在结露初期采用人工翻粮、挖沟等方式进行处理,然而存在着人工难寻找、劳动强度大、作业环境差、翻倒不匀等不足之处[1-2]。针对这些问题,本研究设计了自动化翻粮机,不需要人工劳动,可达到更好的翻粮效果。
翻粮机三维模型如图1,主要由螺旋输送器1和用于该螺旋输送器的驱动电机4构成。螺旋输送器1和驱动电机4通过离合原件彼此可拆卸链接,这样根据使用情况可以选定螺旋输送器1的长度。支撑体6用于防止翻粮机由于粮食对螺旋输送器1产生的向下反作用力而陷入粮堆。支撑体6的地板可以使圆形的、多边形的或流线形的,并垂直于螺旋输送器1的轴,其尺寸与螺旋输送器1的输送功率相对应,使得支撑体6保持在谷物的表面上。支撑体上部、左侧壁、右侧壁和前侧壁形成一个空腔,称之为填料仓,粮食由此卸出。
螺旋输送器1将物料输送到填料仓中,当达到填料仓的最大填料体积后,形成相应的填料压力,将物料从中压出来,物料从填料仓流出过程中产生对填料仓的反作用力,该力作用在填料仓前壁8上,并使整个装置在工作方向上移动。
制动板3、5平行于螺旋输送器1的轴安装,并且相对于螺旋输送器1的轴径向布置,制动板的大小取决于螺旋输送器1的扭转力矩大小。制动板的高度可调节,以便能够调节所需的转力矩大小,以此实现自动转动。
1螺旋输送器;2左侧壁;3左制动板;4驱动电机;5右制动板;6支撑体;7右侧壁;8前壁
图1 翻粮机三维模型
翻粮机的工作原理如图2和图3,在工作状态下,螺旋杆被埋入粮堆,螺旋杆螺距之间的粮食在运动,而螺旋杆周围的粮食仍处于短暂静止状态,静止状态的粮食形成了螺旋输送器的壳体。当下部粮食向上运动,周边上部粮食将在重力作用下下落,以补充下部空隙。
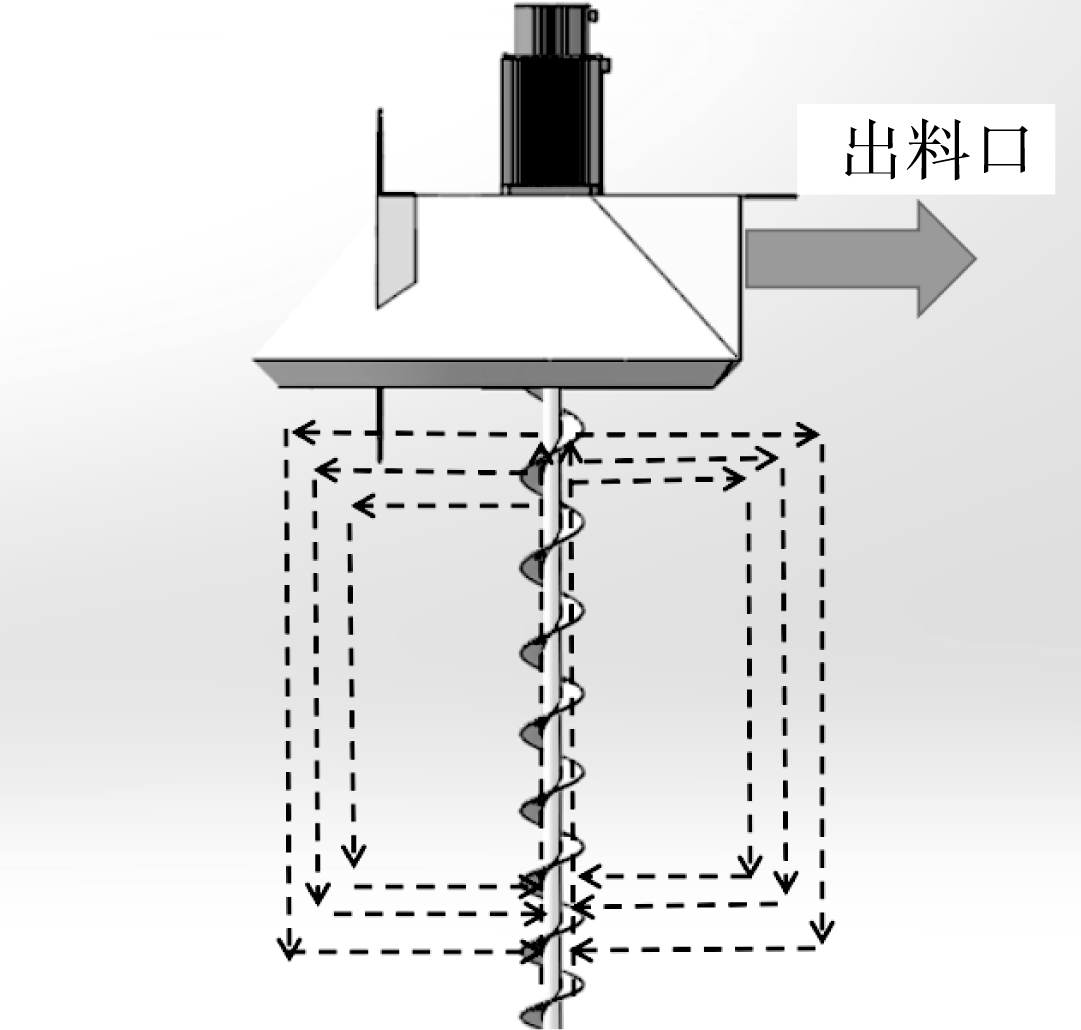
图2 工作原理示意图
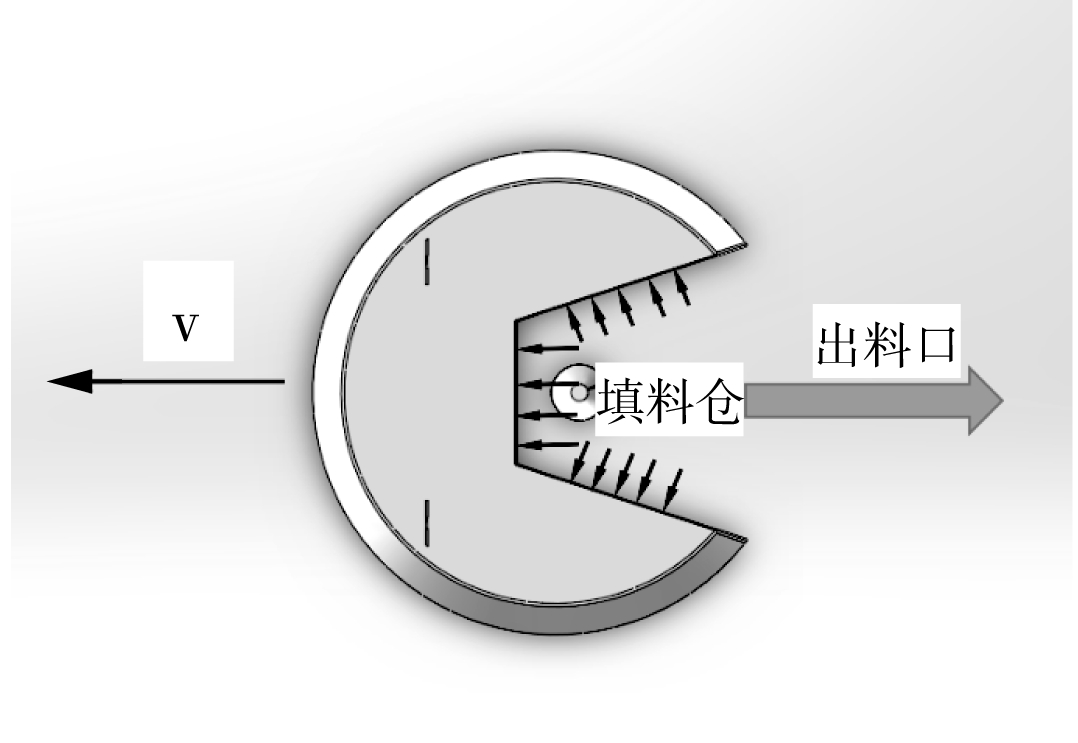
图3 行走原理示意图
翻粮机轴带动螺旋输送器旋转,将螺旋输送器叶片之间的粮食上运,这样下部就形成了空隙,使得周边上部粮食下陷,达到下部粮食上提、周边上部粮食下送的效果,实现上下层粮食翻倒和混合的目的。螺旋输送器上提的粮食经卸料仓排出后,受到周围原静止粮食的阻力作用,阻力要远大于螺旋输送器的旋转作用力,加上翻粮机上部采用锥型空腔式结构,重量较轻,设备受到的阻力很小,因此在粮食卸出时的反作用力的作用下,推动整个设备向前运动。在翻粮机行走过程中,通过调节左右制动板的位置,控制左右两侧制动板受到的阻力,使翻粮机实现自动转动。如果使用多台翻粮机并行作业,可大大缩短翻粮时间,提高翻粮效率。
当粮食填满填料仓,将从出料口被挤出,翻粮机侧壁和前壁将受到粮食的反作用力,推动翻粮机在工作方向上移动,实现自动行走功能。
机轴角速度[4]ωe,颗粒随物料铅垂面的角速度[4]ωa,显然有ωe>ωa。
令Δω=ωe-ωa

(1)
其中![]() 为螺旋叶片半径;r0为转轴半径。
为螺旋叶片半径;r0为转轴半径。

(2)
式中:ρ为物料内摩擦角;Q为产量;γ为物料容重;g为重力加速度;f为物料内摩擦系数。
(3)
粮食颗粒在螺旋叶片上的运动可分为圆周运动和沿斜面向上的运动,圆周速度为v1,由v1所产生的摩擦力为F1;由v2所产生的摩擦力为F2,因此所受的总摩擦力F为F1和F2的合力,F与水平方向的夹角为β,螺旋角为α。如图4所示,质量为m的颗粒受到重力G和力F作用,两者合力为FR,FR的方向和大小受力F的影响,力F与离心力F离心有关,而物料上升必需受到离心力[5]。
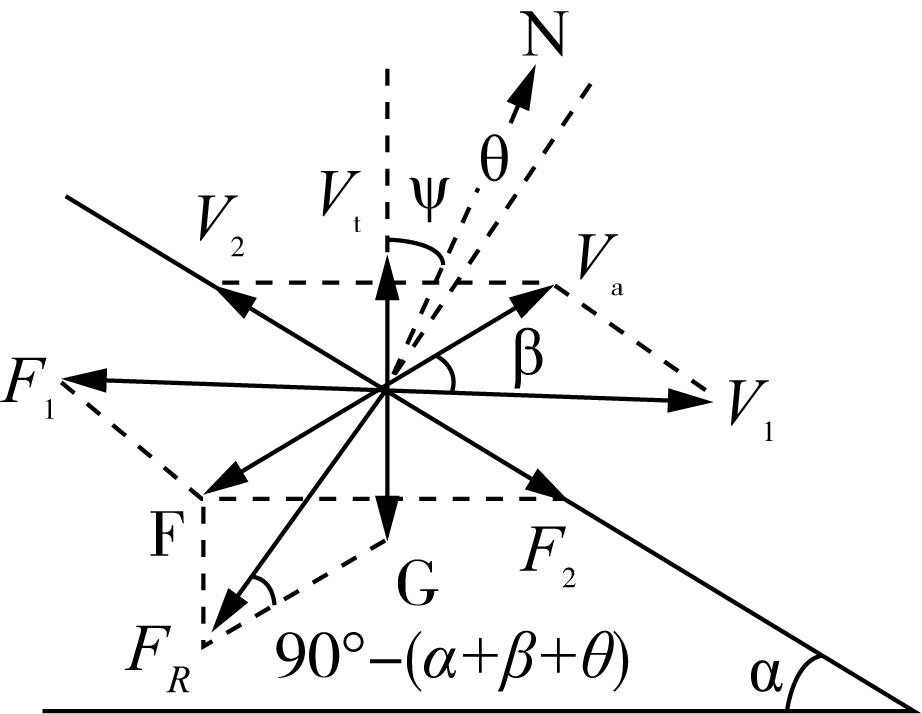
图4 颗粒在螺旋叶片上的受力分析
(4)
(5)
(6)
G=mg
(7)
(1)、(2)、(3)联立即得
(8)
式中:G为物料所受重力;g为重力加速度;α为螺旋升角;θ为物料与螺旋叶片的摩擦角;β为va与水平面的夹角。
产量Q的计算,根据经验公式[6]
Q=47D2ψSnγCK
(9)
式中:D为螺旋叶片的直径;ψ为装满系数;S为螺距;C为倾斜修正系数;K为螺旋叶片的影响系数。
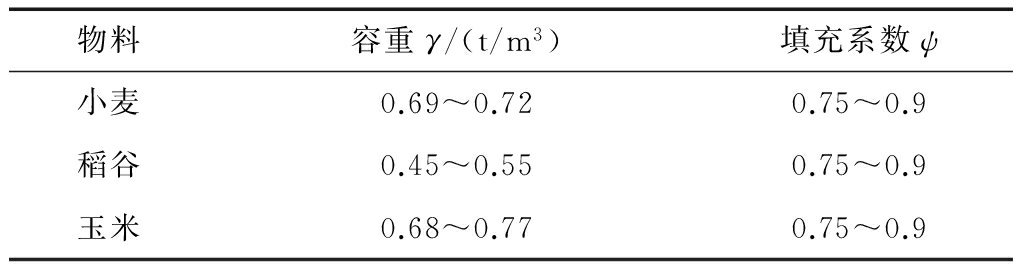
翻粮机在工作过程中,螺旋叶片全部进入粮堆中,所以装满系数ψ不同于普通螺旋输送器。根据经验,装满系数的ψ取0.7~0.9之间,且转速n越大,ψ将减小,ψ的取值参考表1。
表1物料容重和填充系数
转轴功率N轴计算如式(10)。
N轴![]()
(10)
式中,H为提升高度;ξ为总阻力系数。
电机功率N电计算如式(11)。
N电![]()
(11)
η为传动系数;k2为电动机功率储备系数。
物料上升的轴向速度νt计算如式(12)。
(12)
每秒进入填料仓物料的体积V计算如式(13)。
(13)
行走速度v计算如式(14)。
(14)
L为出料口长;h为出料口高;h为漏料口高![]() 为漏料系数,取1.1~1.3。
为漏料系数,取1.1~1.3。
卸料口如图5所示。
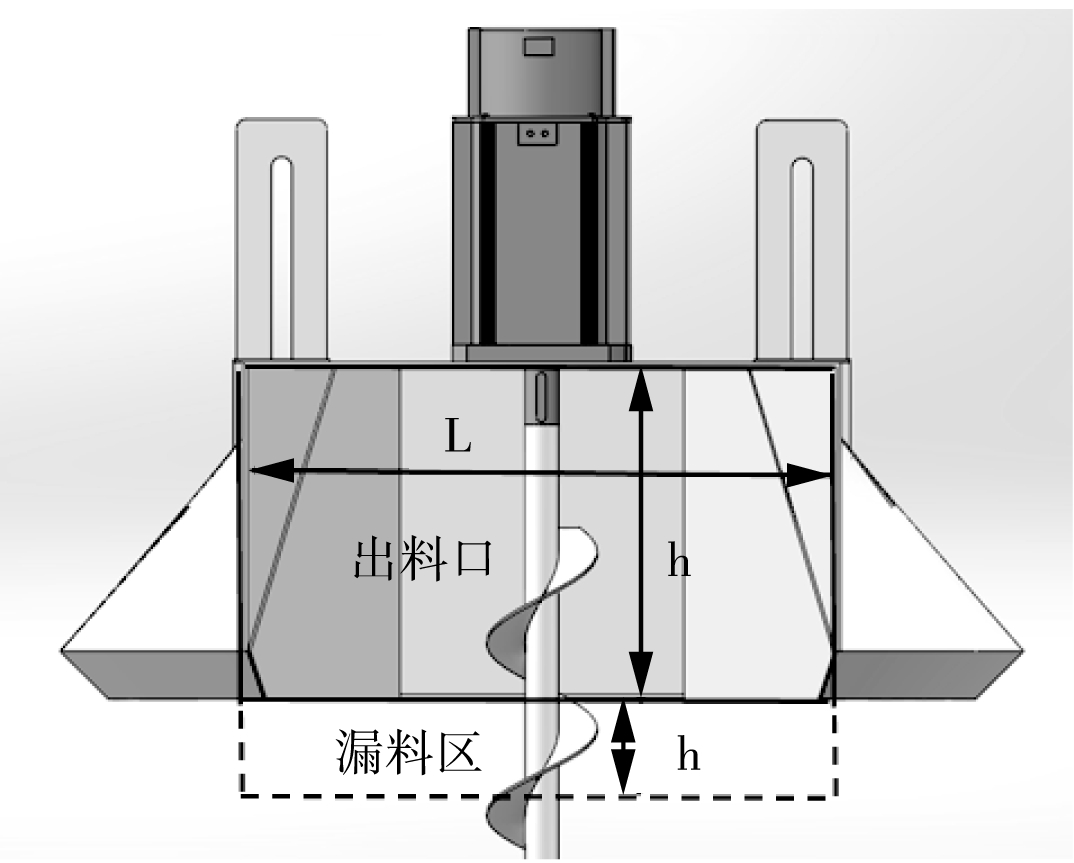
图5 卸料口
稻谷翻粮机的计算示例:已知稻谷内摩擦角ρ=27.5°,稻谷与螺旋叶片(钢)的摩擦角θ=18.5°,翻粮深度3 m,螺旋器直径160 mm,转轴直径30 mm。要求产量10 t/h。
1)按照螺距选用原则![]() 可以取90 mm、100 mm、110 mm。
可以取90 mm、100 mm、110 mm。
2)取S=100 mm,由公式(2)求ωa。
![]()

=55.629 rad/s
3)由公式(1)可得:
Δω=29.204rad/s
ωe=ωa+Δω=84.832 rad/s
最佳转速![]()
4)由公式(8)求得螺旋角ɑ=11.25°
由公式(12)计算物料上升的轴向速度νt。
5)翻粮机行走速度v的计算,出料口宽L=0.610 m,高h=0.350 m
=5.662 m/min
得出用于水稻翻粮机的参数匹配关系如表2所示。
表2用于水稻翻粮机的参数匹配关系
同样,可以得出适用于小麦、玉米的翻粮机的参数匹配关系,如表3和表4所示。
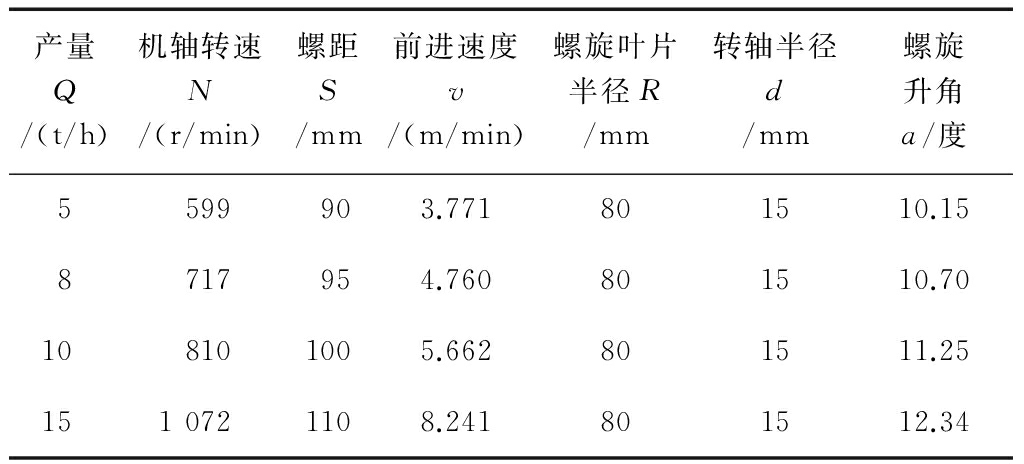
表3用于小麦的翻粮机参数匹配关系
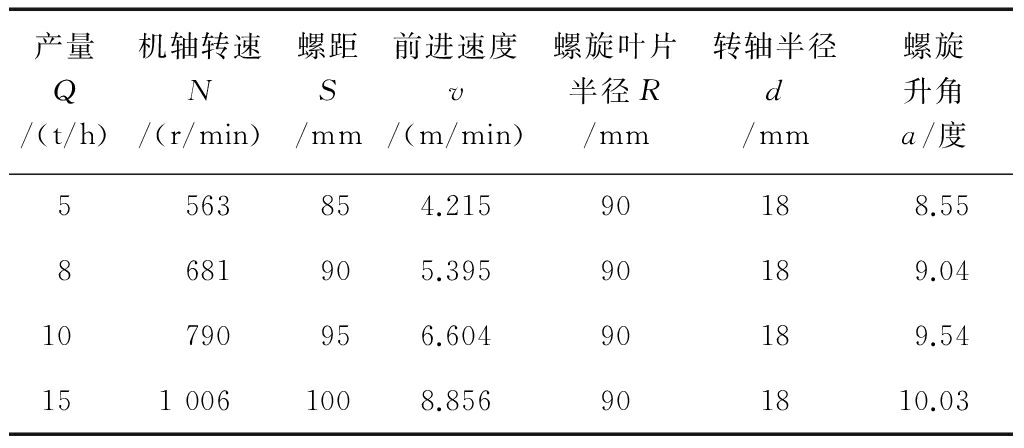
表4用于玉米的翻粮机参数匹配关系
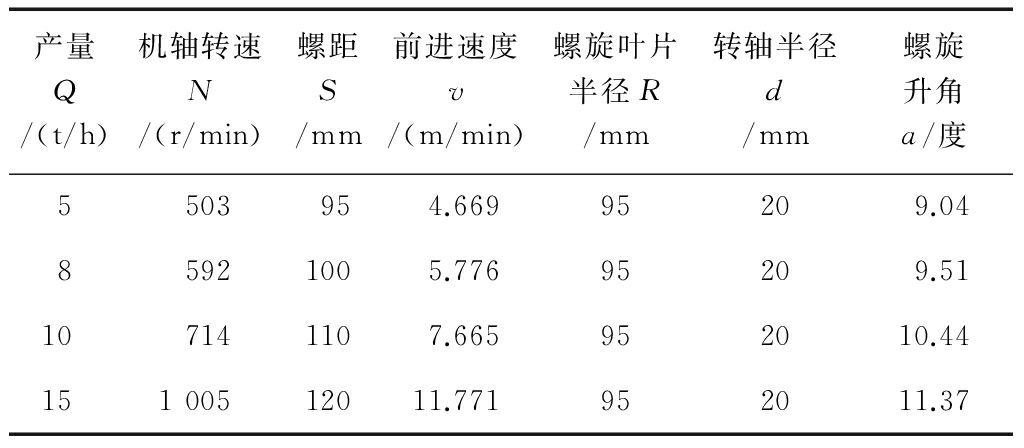
由表2、表3、表4可以得出,对于同种粮食产量越大,最佳转速越高,行进速度越快,螺距越大,螺旋升角越大。对于不同粮食,产量相同时,容重越大和摩擦角越小,最佳转速越高,螺距越大,行进速度越快。
通过建立翻粮机螺旋提升粮食的数学模型,得出最佳转速、螺距、产量、行进速度和螺旋升角的对应关系,根据不同粮食颗粒的容重、摩擦角、颗粒大小的不同特征,得出了适用于不同粮食物料的翻粮机参数匹配关系,如表2、表3、表4所示,为翻粮机的设计提供了理论依据和数据参考。
参考文献:
[1]张来林,韩志强,吕建华.一种用于处理结露粮层的翻粮机[J].粮食储藏,2012,41(2):44-46.
[2]张来林,李岩,张克诚.自动行走翻粮机的应用试验[J].粮食加工,2012,37(2):52-53.
[3]蒙贺伟,坎杂,李亚萍.奶牛饲喂装置中螺旋输送器的设计及三维造型[J].农机化研究,2008(10):61-63.
[4]郑贵然.对立式螺旋输送机最佳工作状态的探讨[J].郑州粮食学院学报,1991(4):33-43.
[5]胡勇克,戴莉莉,皮亚南.螺旋输送器的原理与设计[J].南昌大学学报(工科版),2000(4):29-33+91.
[6]刘四麟.《粮食工程设计手册》(新版)[M].郑州大学出版社,2002:694-695.
JIN Hang-jia,LI Yong-xiang,WANG Ming-xu
(Henan University of Technology,Zhengzhou Henan 450009)
Abstract:Based on the working principle, structure and material movement and mechanics and mathematical analysis of the turning machine, the mathematical model of the key parameters of turning grain machine is established. The relationship between the optimum speed, pitch, spiral angle and travel speed of rice grain, wheat, corn and other food materials and the corresponding numerical table under the different yield is given. The design of the turning machine has a certain reference and practical value.
Key words:grain stirrer; optimal speed; moving speed
收稿日期:2017-10-18
基金项目:河南省教育厅自然科学项目(18A460012);河南工业大学校属学科平台开放课题(001246);郑州市科技局自然科学项目(20150253)
作者简介:靳航嘉,1994年出生,男,在读研究生.
通讯作者:王明旭,1980年出生,男,副教授,博士.
中图分类号:S 379.3
文献标识码:A
文章编号:1007-7561(2018)02-0075-04