
王中营1,张海红1,武文斌1,李永祥2
(1.河南工业大学机电工程学院,河南 郑州 450001;2.河南工业大学研究生处,河南 郑州 450001)
摘 要:为研究高效振动筛在激振合力作用线偏移筛体质心时的运动规律,采用Solidworks和ADAMS软件建立了TQLZ型高效振动筛的虚拟样机模型,研究激振合力作用线偏移筛体质心的位置对筛体典型点运动的影响。结果显示:当激振合力作用线从筛体质心上方经过时,筛面前端点的合成振幅和振动方向角增大,而筛面后端点的则减小,上层筛面点的振幅大于下层筛面点的;反之,当激振合力作用线从筛体质心下方经过时,筛面的运动规律则相反;无论激振合力作用线与筛体质心的相对位置如何,筛体上各点的运动轨迹都近似为一条直线,并且对筛体质心的运动没有影响;激振合力作用线偏移筛体质心的位置主要影响筛体的y向振幅,而对x向振幅影响较小。该结论为设计出性能更加优良的振动筛提供理论依据。
关键词:高效振动筛;虚拟样机;偏移质心;振幅;动力学
TQLZ型高效振动筛广泛应用于油料加工、粮食加工、饲料加工和种子筛选等行业中,其主要作用是清除物料颗粒中的杂质和实现物料粒度的分级[1]。目前,曾有学者对高效振动筛进行了一些理论研究[2-7],其理论分析的前提是假设双振动电机的激振合力通过筛体质心,筛体做往复直线运动。但是,由于在设计、制造和装配等过程中存在的误差,都有可能使激振合力作用线偏移筛体质心,这必然导致筛体上各点的振幅、运动轨迹和振动方向发生改变[8],而这三者是影响物料自动分级、筛分效率和输送速度的重要因素[9]。因此有必要对激振合力作用线偏移筛体质心时对筛体典型点运动特性的影响规律进行研究,为设计性能优良的高效振动筛提供工程设计依据。
本文以河南某公司生产的TQLZ型高效振动筛为研究对象,采用Solidworks软件建立振动筛的三维实体模型,随后将模型导入ADAMS软件中建立振动筛的虚拟样机模型,通过改变激振合力作用线偏移筛体质心的位置和虚拟样机仿真实验,研究筛体典型点的运动轨迹、振幅和振动方向角及其规律,为合理布置激振合力作用线位置,改善振动筛筛分效果提供科学依据。
TQLZ型高效振动筛的三维模型图如图1所示,它主要由筛箱、机架、4个橡胶弹簧、2台振动电机、进料箱和出料箱等部分组成。整个筛箱由4个橡胶弹簧支撑在机架上,筛箱内安装有上、下两层筛格,2台参数相同的振动电机分别对称安装在筛箱的两侧,通常情况下2台振动电机的安装圆盘中心连线应通过筛体质心。振动筛工作时,2台振动电机以相同的角速度相向转动,振动电机内部偏心块产生的离心惯性力沿筛体横向方向上互相抵消,沿筛体纵向方向上相叠加,筛体在这一简谐力的作用下做往复直线运动。
图1 高效振动筛的三维模型
2 偏移质心激振高效振动筛虚拟样机模型的建立
2.1 工作原理模型的简化
在建立振动筛虚拟样机模型之前,需要对振动筛的工作原理模型进行简化,简化后模型如图2所示。为便于分析,将进料箱、出料箱、筛箱、筛格和振动电机作为一个整体运动的筛体刚体,假设筛体质心所在位置为O点,筛体质量为M,过O点建立直角坐标系xOy;双振动电机以角速度ω做同速相向转动,且二者无相位差,单台振动电机单组偏心块质量为m0,偏心距为r,则双台振动电机的激振合力f(t)为4m0ω2rsinωt;假设激振合力作用线偏移筛体质心,偏移距离为OE,激振合力作用线与水平面的夹角即激振合力方向角为α;橡胶弹簧分解为沿水平和铅垂两个方向的线性弹簧,其刚度分别为Kx和Ky,其中Kx=2kx,Kx=2ky;系统阻尼也简化为沿水平和铅垂两个方向的粘性阻尼,阻尼系数分别为Cx和Cy。

图2 偏移质心激振的高效振动筛简化模型
2.2 橡胶弹簧刚度确定
通常情况下,振动筛工作频率ω与固有频率ωn之比为2.5~4[7],为使振动筛在远超共振状态下工作,取ω/ωn为4,已知振动筛工作频率ω为100 rad/s,则ωn取为25 rad/s。振动系统的固有频率取决于振动体质量M和振动方向上的弹簧刚度K,其关系满足:
(1)
根据振动筛虚拟样机模型和材料属性,由软件计算出筛体质量M为747 kg,将其代入(1)式可得K为466.8 kN/m,假设每个橡胶弹簧均匀承重,则每个橡胶弹簧的刚度为116.7 kN/m,由文献[7]可知该橡胶弹簧的轴向刚度ky与横向刚度kx之比约为6.5,并且振动方向弹簧刚度K与弹簧刚度kx和ky应满足以下关系式:
k=kxcos2α+kysin2α
(2)
因此有kx=49 kN/m,ky=319 kN/m。
2.3 虚拟样机模型的建立
在SolidWorks软件环境下完成振动筛各个三维零部件和装配模型的绘制,并将整机装配模型保存为*.x_t格式,随后在ADAMS/View中读取该格式文件,完成模型数据交换。振动筛装配模型导入ADAMS后还不能直接进行计算,需要对其进行以下操作:进料箱、出料箱、筛箱、筛格和振动电机等零部件是通过螺栓连接在一起,要在一起运动,因此需要采用布尔(Boole)操作将它们合并,使之构造成一个刚体;机架与大地(Ground)之间建立固定约束副(Fixed constraint);橡胶弹簧由4组x和y向拉压弹簧阻尼器来替代,每组弹簧刚度按x与y向之比为1∶6.5的比例进行分解;激振合力分解为沿x向分量4m0ω2rcosαsinωt与y向分量4m0ω2rsinαsinωt,并平均施加到振动筛两侧振动电机安装圆盘的圆心位置;添加振动筛重力加速度和各零部件的材料密度等,并从ADAMS模型信息中提取出筛体的质量M。所建立的虚拟样机模型如图3所示。

图3 振动筛的ADAMS虚拟样机模型
TQLZ型高效振动筛通常设置有2层倾斜的筛面,为探寻沿筛面宽度方向和不同层筛面点的运动规律,在第一层筛面前端宽度方向上设置三个考察点A、B和C,在C点正下方的第二层筛面上设置一个考察点D,沿第一层筛面长度方向均分设置四个考察点C、E、F和G,考察点位置示意图如图4和图5所示。
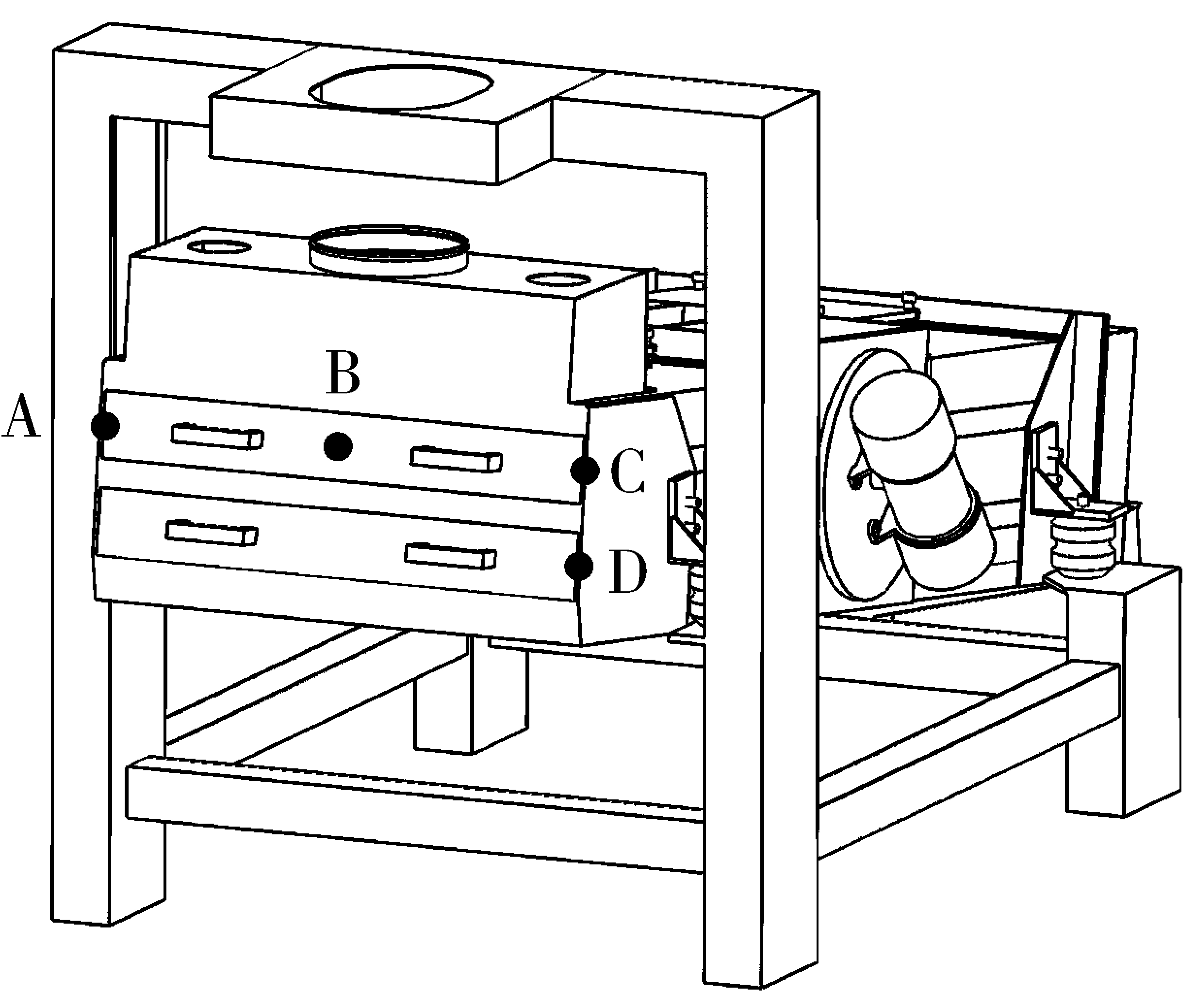
图4 筛面宽度方向考察点分布
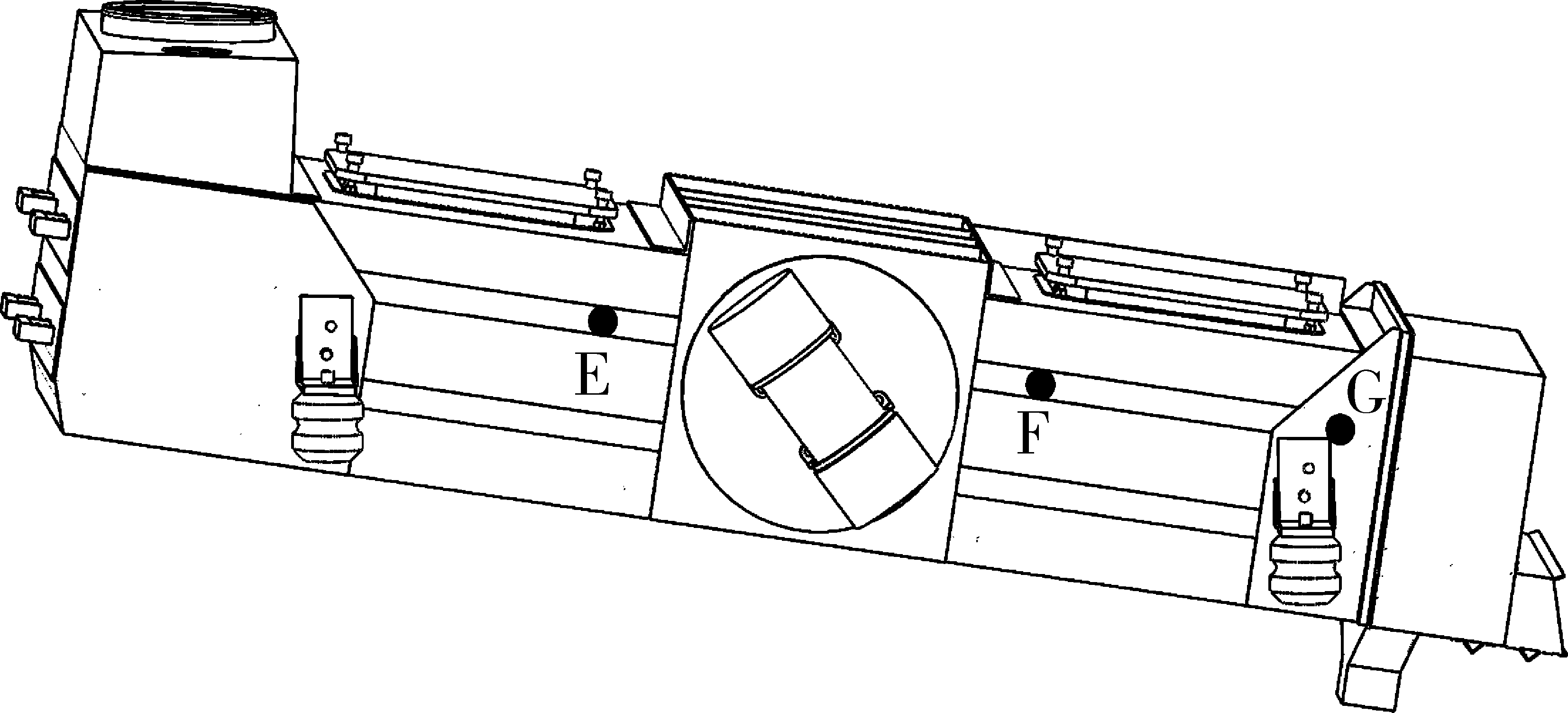
图5 筛面长度方向考察点分布
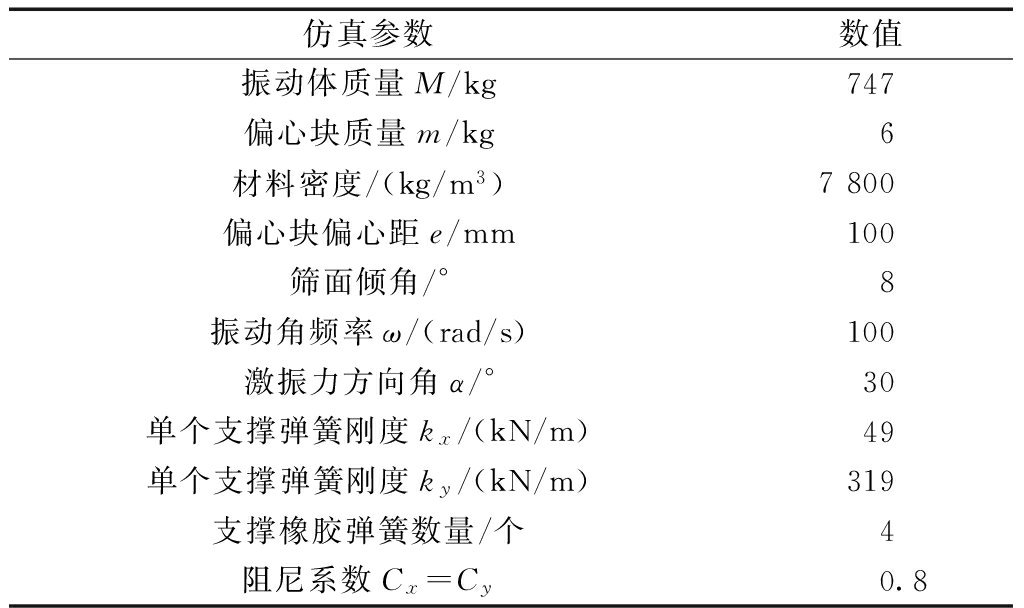
根据厂家提供的技术参数和前期的理论计算结果,可得到振动筛的基本参数,如表1所示。振动筛虚拟样机采用表1给出的参数进行仿真,设定仿真时间为4 s,仿真子步数为4 000,模型由零初始平衡状态开始仿真,设置筛体质心和上述考察点为测量点,测量各点的振幅、实际振动方向角和运动轨迹等。以下从激振合力作用线与筛体质心的相对位置关系对各测量点运动的影响规律进行研究。
表1 振动筛虚拟样机仿真参数
3.1 激振合力作用线经过筛体质心时各点的运动情况
假设激振合力作用线通过筛体质心,由上述虚拟样机模型仿真得到各测量点的振幅和振动方向角,如表2所示,其中合成振幅A和振动方向角β可分别由(1)式和(2)式求出。分析表2可以看出,此时各测量点沿x向和y向振幅、合成振幅以及振动方向角基本相同。图6所示为筛体质心的运动轨迹,不难看出其为椭圆运动轨迹,但由于短轴长度非常小,因此质心的运动轨迹可以近似为一条直线。
(1)
式中,Ax与Ay分别为测量点沿x向和y向的振幅。
筛体的振动方向角β为:
β=arctan(Ay/Ax)
(2)
表2 激振合力作用线通过筛体质心时各点的运动情况
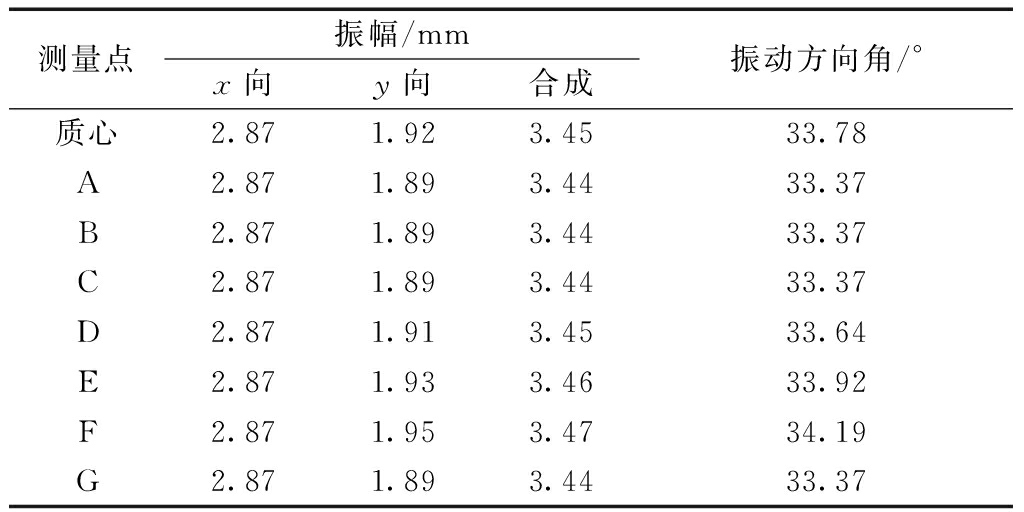
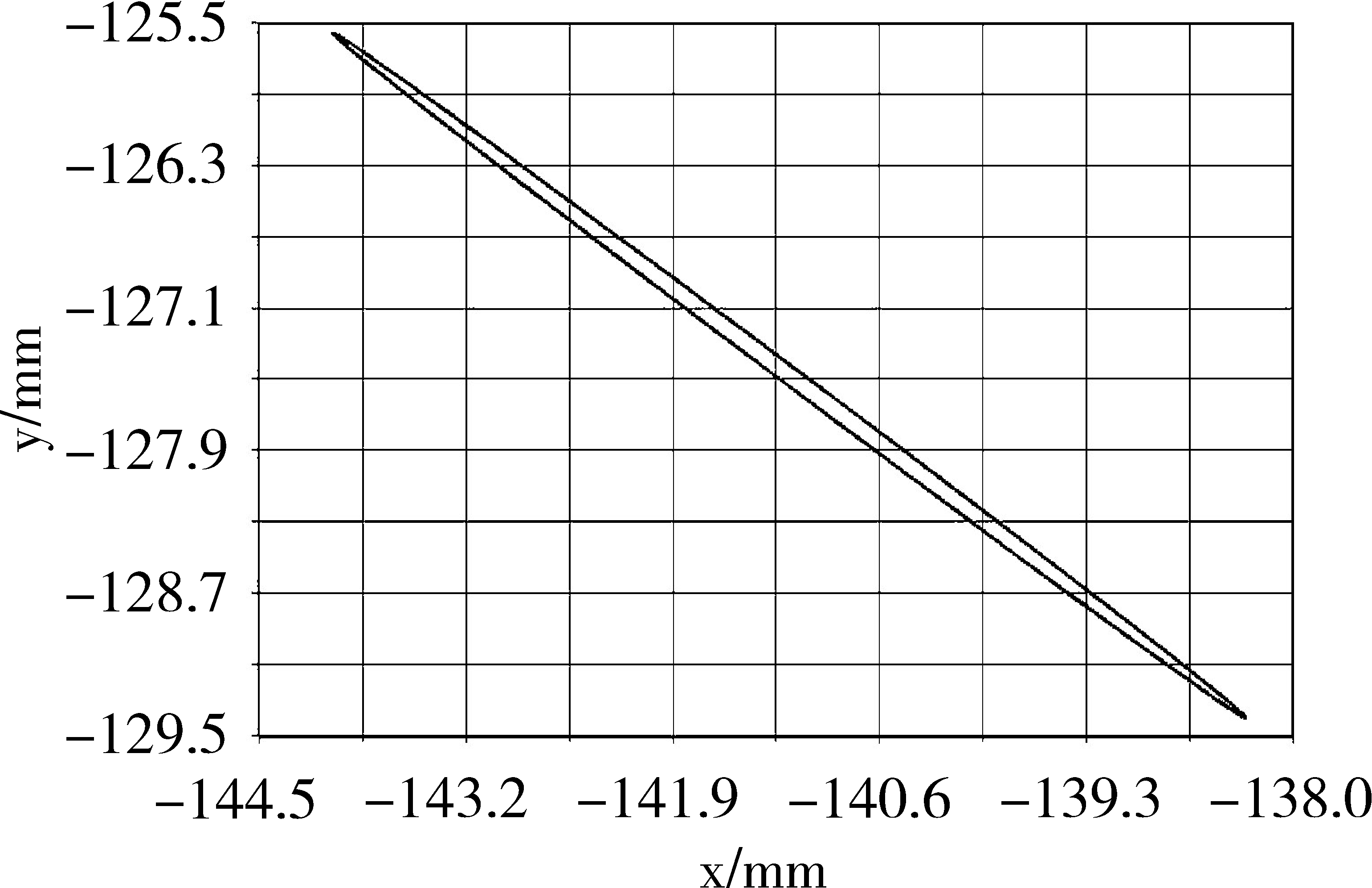
图6 筛体质心的运动轨迹
3.2 激振合力作用线从筛体质心上方通过时各点的运动情况
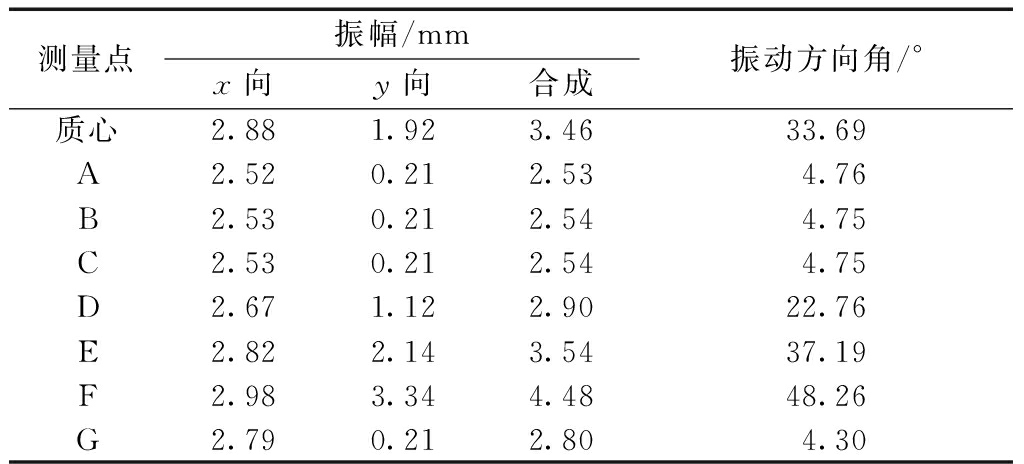
假设激振合力作用线从筛体质心上方通过,并且作用线偏移筛体质心的距离为150 mm,仿真得到各测量点的运动情况,如表3和图7所示。分析表3可得:A、B和C测量点即第一层筛面宽度方向对应点的振幅和振动方向角一致;第一层筛面C点的合成振幅和振动方向角大于第二层筛面D点的;从第一层筛面前端至末端即沿C、E、F和G点的顺序,对应点的合成振幅和振动方向角逐渐减少,但在G点急剧升高;各测量点的x向振幅变化较小,但是y向振幅变化较大,正是因为这个较大的变化,导致各点合成振幅和振动方向角的差异较大,由此说明激振合力作用线偏移筛体质心对筛体各点沿y向振幅的影响较大,而对x向振幅影响较小。由图7可以看出,各测量点的运动轨迹均为一椭圆,尽管椭圆短轴有所不同,但是与长轴长度相比,短轴非常小,可以忽略不计,因此各点的运动轨迹依然可近似为一条直线。
表3 激振合力作用线从筛体质心上方通过时各点的运动情况
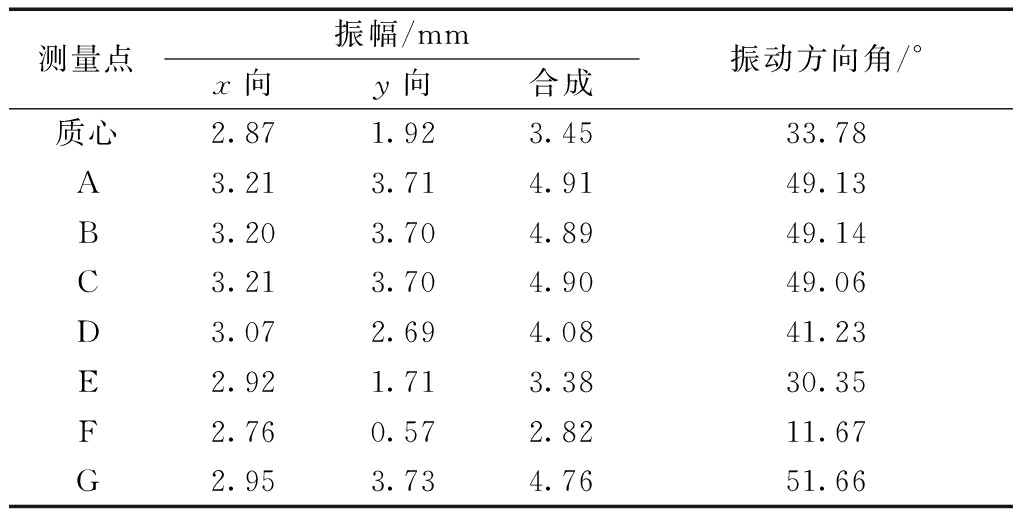
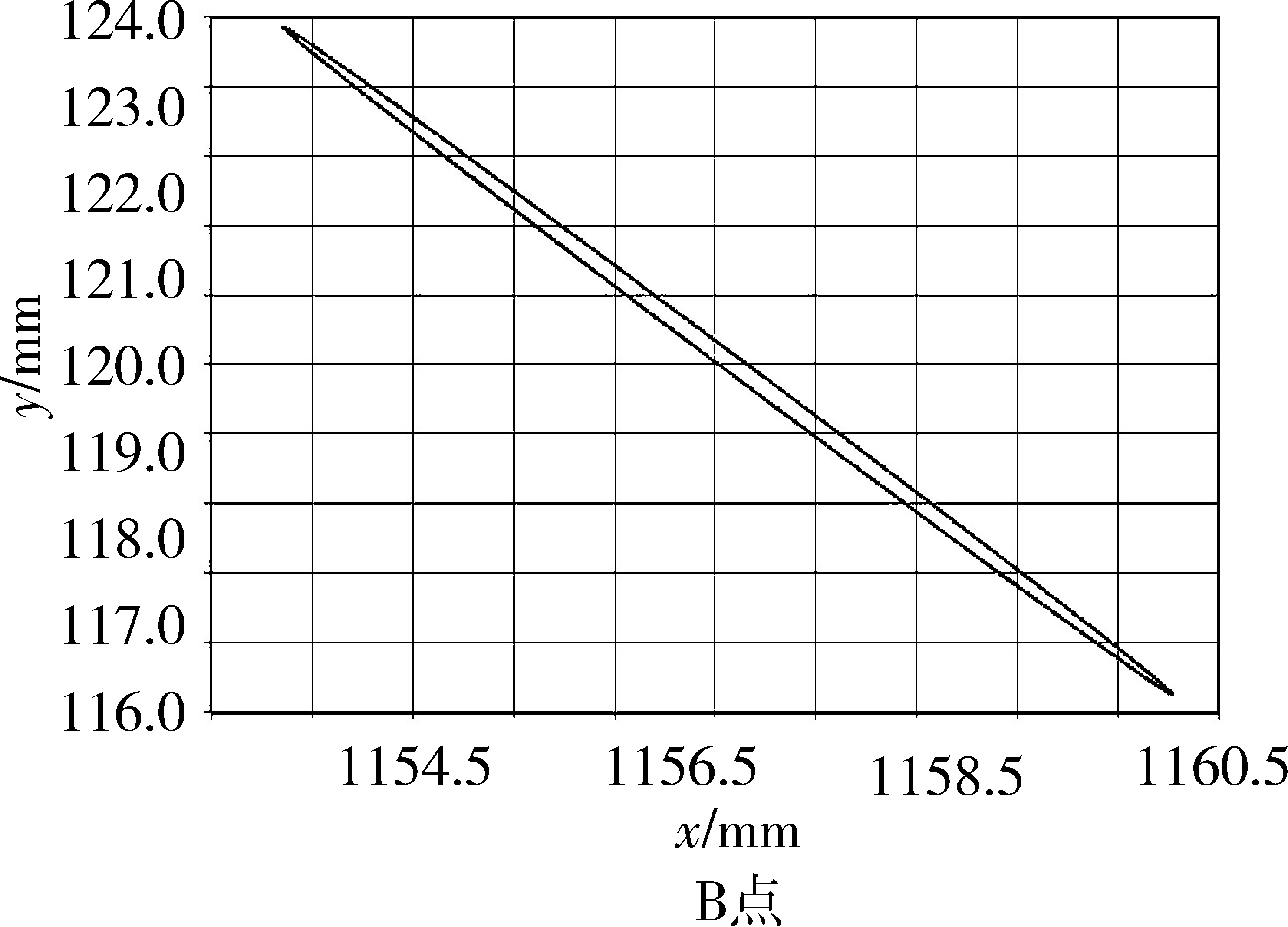


图7 部分测量点的运动轨迹
3.3 激振合力作用线从筛体质心下方通过时各点的运动情况
假设激振合力作用线从筛体质心下方经过,且作用线与筛体质心相距150 mm,仿真得到各点的运动情况,如表4所示。分析表4可知:A、B、C三点的振幅和振动方向角一致,D点的大于C点;筛面沿点C、E、F、G顺序对应的合成振幅和振动方向角逐渐增大,但在G点急剧降低。另外各点的椭圆运动轨迹的短轴仍然很小,运动轨迹可以近似成一条直线,这里不再附图说明。
表4 激振合力作用线从筛体质心下方通过时各点的运动情况
当激振合力作用线经过筛体质心时,筛体各点的振幅和振动方向角基本相等。
当激振合力作用线从筛体质心上方经过时,筛体前端的合成振幅和振动方向角增大,而后端的减小,上层筛面振幅大于下层筛面;反之,筛体的运动规律则相反。
无论激振合力作用线与筛体质心的相对位置如何,筛体上各点的运动轨迹都近似为一条直线,同时对筛体质心的运动没有影响。
激振合力作用线偏移筛体质心的位置主要影响筛体的y向振幅,对x向振幅影响较小。
激振合力作用线偏移筛体质心时,筛面末端点G的振幅与筛面其它点振幅的变化趋势相异,这种现象有必要进一步深入研究。
根据筛体以上运动规律、被处理物料的性质和筛分目的,通过设置合理的激振合力作用线偏移筛体质心的距离和位置,使振动筛对物料的自动分级、筛分效率和输送速度达到理想效果。
参考文献:
[1]阮竞兰,屈少敏.往复振动筛运动参数的优化设计[J].中国粮油学报,2001,16(3):60-62.
[2]胡继云,张玺斌,南瑞民.惯性往复振动机械水平和铅垂支承刚度设计[J].中国粮油学报,2009,10:120-123.
[3]胡继云,雷飞,秦玉良.惯性往复振动机械阻尼值设计的理论研究[J].河南工业大学学报(自然科学版),2010,31(2):19-22.
[4]廉振红.惯性往复振动机械的系统设计理论及其应用[D].河南工业大学硕士论文,2007.
[5]刘洁源.直线振动筛的动力学分析与结构优化设计[D].太原理工大学硕士论文,2012.
[6]张永林,王章海.振动电机激振的振动筛运动分析及主参数设计[J],粮食与饲料工业,1998(9):18-19.
[7]刘绍文.TQLZ振动分级筛振动设计[J].粮食与饲料工业,1992(6):15-17.
[8]于京阁,董怀荣,安庆宝.合成激振力不通过筛箱质心时的振动筛动力学分析[J].石油钻探技术,2009,37(4):76-79.
[9]李洪昌,李耀明.基于EDEM的振动筛分数值模拟与分析[J].农业工程学报,2011,27(5):117-121.●![]()
WANG Zhong-ying1,ZHANG Hai-hong1,WU Wen-bin1,LI Yong-xiang2
(1.College of Mechanical and Electrical Engineering,Henan University of Technology,Zhengzhou 450001;2.Graduate Department,Henan University of Technology,Zhengzhou 450001)
Abstract:In order to analyze the movement of the efficient vibrating screen in the case of the action line of the exciting force offset screen centroid. A virtual prototype model of TQLZ type vibrating screen was established using Solidworks and ADAMS software. The influence of the location of the action line of the exciting force offset screen centroid to the movement of typical point on the screen body was studied. The results showed that: when the action line of the exciting force passes through above the screen centroid, the synthesis amplitudes and the vibration direction angles of the upper points on the screen increase, while the lower points' are reduced. The amplitudes of the upper screen points are greater than the lower screen points. On the contrary, when the action line of the exciting force passes through below the screen centroid, the movement of the screen is opposite. Regardless of the relative position of the action line of the exciting force and the screen centroid, the trajectory of an arbitrary point on the screen is approximate to a straight line, and no effect on the movement of the screen centroid. The position of the action line of the exciting force offset screen centroid affect the amplitude ofy direction of the screen mainly and smaller affect on the amplitude of x direction. The conclusion provides a theoretical basis to design a more excellent performance of vibrating screen.
Key words:efficient vibrating screen; virtual prototype; offset centroid; amplitude; dynamics
收稿日期:2015-07-01
基金项目:国家“十二五”科技支撑计划项目(2011BA D03B 01-03);河南省重大科技专项(121199110120);河南工业大学高层次人才基金项目(2010BS050)
作者简介:王中营,1979年出生,男,讲师,博士.
中图分类号:TS 210.3
文献标识码:A
文章编号:1007-7561(2016)01-0021-04